Join to our channels: new products, coupons, best deals:
Multirotors
Matek M9N-CAN GNSS (GPS, GLONASS, Galileo and BeiDou) UAVCAN & MSP
Multirotors → GPS Modules → Matek M9N-CAN GNSS (GPS, GLONASS, Galileo and BeiDou) UAVCAN & MSP UAVCAN & MSP")
GNSS M9N-CAN, UAVCAN & MSP
AP F303 CAN node, NEO-M9N, QMC5881L, DPS310, I2C, UART1 & UART3 breakout. UAVCAN protocol & UART_MSP

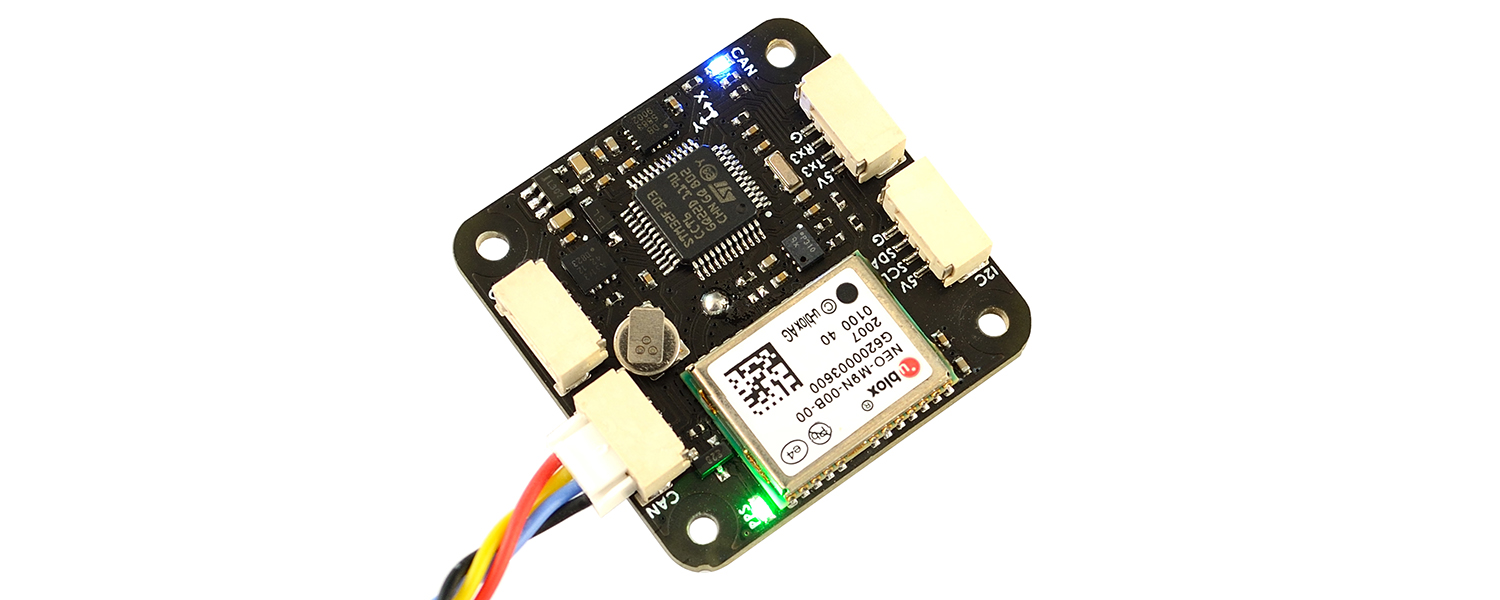
Gallery
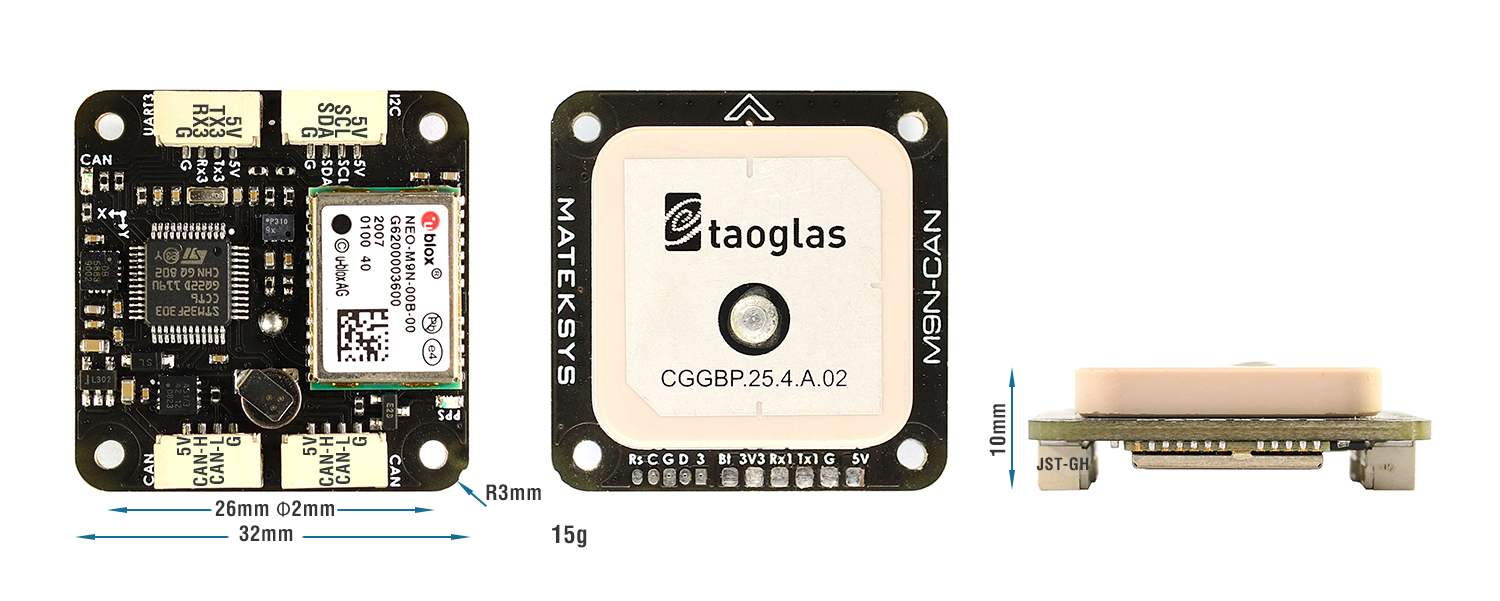

Specifications
Pinout & Pads
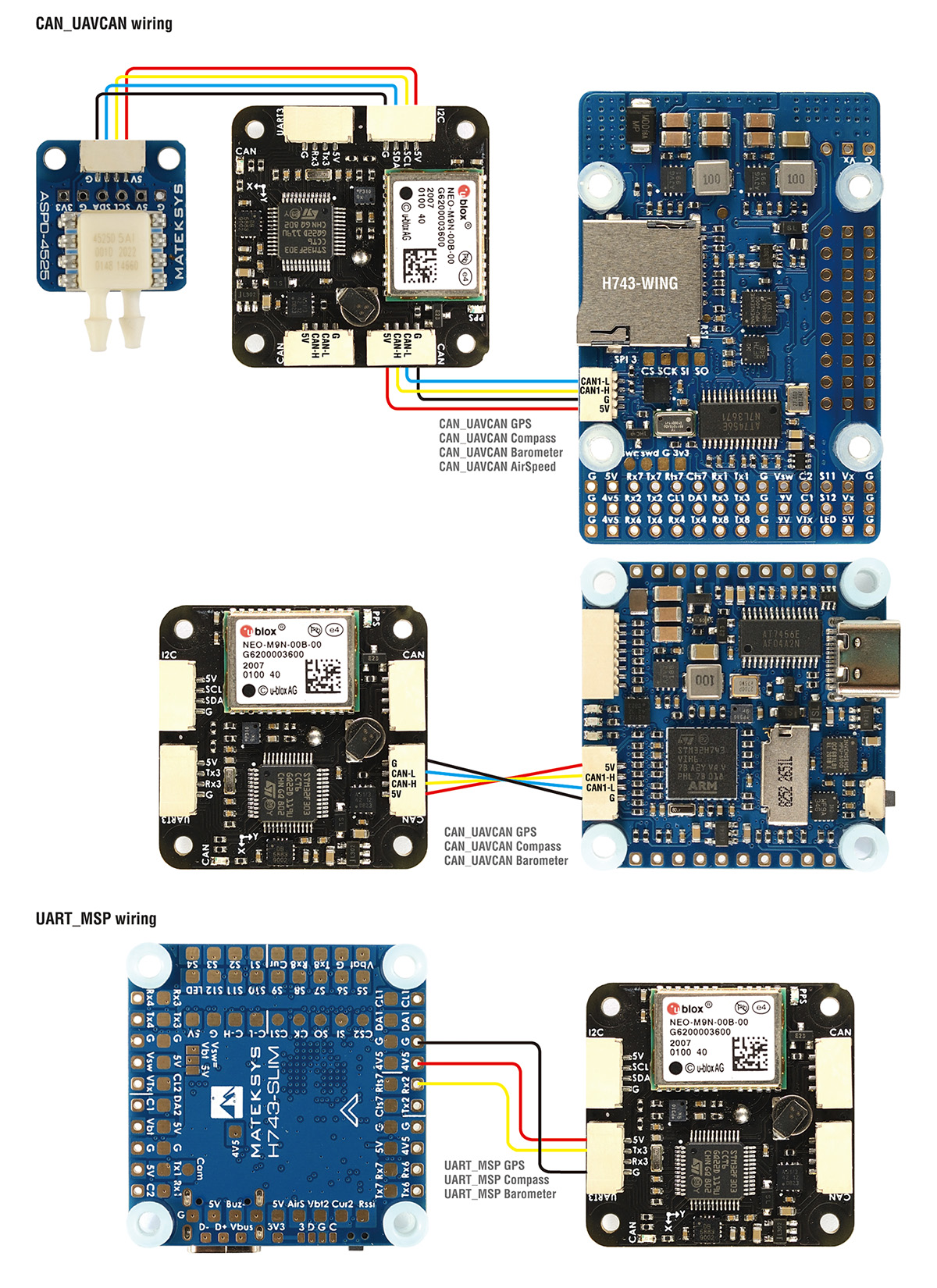
Wiring
UAVCAN Parameters
MSP Parameters
STL and STEP
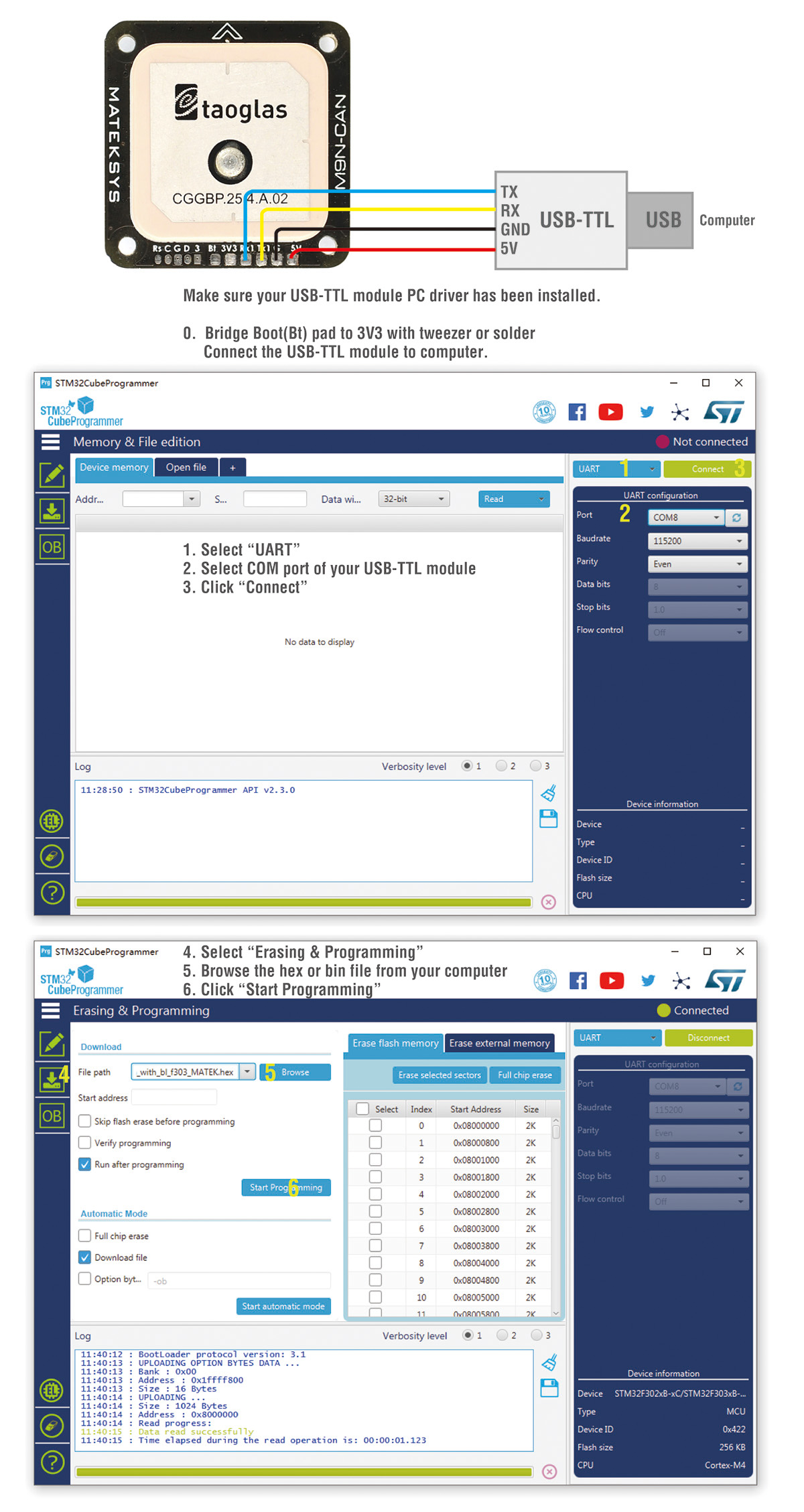
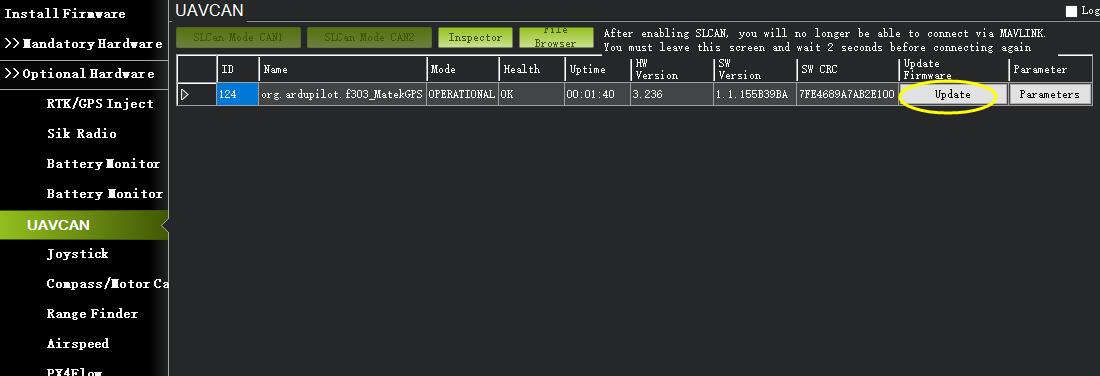
Update Firmwares
Resellers
Share
Preise für Matek M9N-CAN GNSS (GPS, GLONASS, Galileo and BeiDou) UAVCAN & MSP in den Läden
Angebote gefunden: 14 ()
Siehe auch

Join to our channels: new products, coupons, best deals: